Collision Models
This section covers the collision model system in DexRobot MuJoCo, including both full mesh-based collisions and simplified primitive-based collisions.
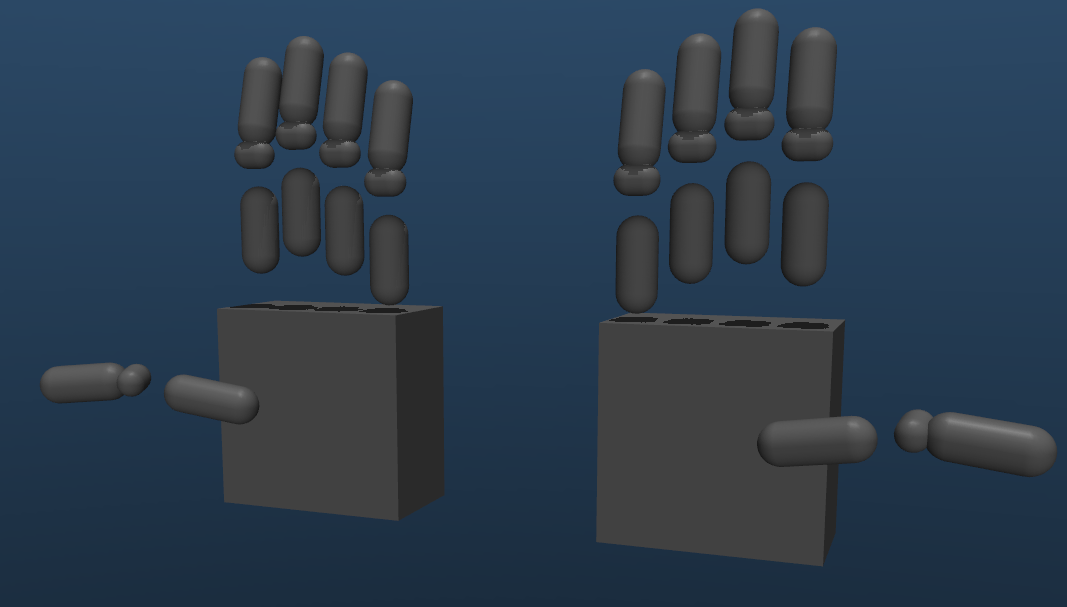
Comparison of full mesh-based (left) and simplified primitive-based (right) collision models.
Collision Model Types
Full Mesh-Based Collisions
The default collision model uses the full mesh geometry from the URDF:
Accurate representation of hand geometry
Higher computational cost
Better for visualization and precise contact modeling
Suitable for non-real-time applications
Simplified Primitive-Based Collisions
The optimized collision model uses primitive shapes:
Boxes for palm and base
Capsules for finger segments
Significantly faster computation
Suitable for real-time applications
Maintains essential contact behavior
Configuration
Collision Model Definition
Simplified collision models are defined in YAML format:
# Example from dexhand021_right_simplified.yaml
right_hand_base:
type: box
size: [0.0273, 0.05, 0.05]
pos: [-0.0022, 0, 0.11]
r_f_link1_2:
type: capsule
size: [0.0095]
fromto: [0.00, 0, 0, 0.03, 0, -0.002]
Box Parameters
type: box- Specifies a box primitivesize: [x, y, z]- Half-lengths in each dimensionpos: [x, y, z]- Center position relative to link frame
Capsule Parameters
type: capsule- Specifies a capsule primitivesize: [radius]- Radius of the capsulefromto: [x1, y1, z1, x2, y2, z2]- Endpoint coordinates
Usage
Converting with Simplified Collisions
Use the --simplified-collision flag with convert_hand.py. The conversion now supports both body elements (for physics simulation) and site elements (for sensors) for fixed links:
python scripts/convert_hand.py \
--urdf hand.urdf \
--simplified-collision config/collision_geoms/dexhand021_right_simplified.yaml
Manual Application
Apply simplified collisions to an existing MJCF:
from dexrobot_mujoco.utils.mjcf_utils import update_geom_collisions
update_geom_collisions(
xml_file_path='model.xml',
collision_yaml_path='collision_config.yaml'
)
Collision Groups
The collision system uses different groups for visualization and collision:
<!-- Visual geometry -->
<geom group="1" contype="0" conaffinity="0"/>
<!-- Collision geometry -->
<geom group="3" contype="1" conaffinity="1"/>
Group Assignments
Group 1: Visual geometries (no collision)
Group 3: Collision geometries
Contype/Conaffinity: Contact generation properties
Collision Exclusions
Some collisions are automatically excluded to prevent self-interference:
Fingertip-Fingertip
Allows finger-finger contact:
fingertip_re = r"[lr]_f_link\d_4" # Matches fingertip links
allowed_collision_pairs = [
(fingertip_re, fingertip_re)
]
Fingertip-Palm
Allows fingers to contact palm:
palm_re = r"[lr]_p_link\d" # Matches palm links
allowed_collision_pairs.append(
(fingertip_re, palm_re)
)
Implementation
The collision system is implemented in several utility functions:
Fixed-Link Conversion
The enhanced URDF to MJCF conversion now supports dual representation of fixed links like finger pads and tips. For Isaac Gym compatibility, these elements are converted to bodies with geoms, while maintaining site elements for sensor attachments:
# In the urdf2mjcf function:
def urdf2mjcf(urdf_path, output_dir,
fixed_to_body_pattern=r".*(pad|tip).*",
fixed_to_site_pattern=r".*pad.*"):
"""Convert URDF to MJCF with enhanced fixed link handling.
Args:
urdf_path: Path to input URDF
output_dir: Output directory
fixed_to_body_pattern: Regex pattern for fixed links to convert to bodies
fixed_to_site_pattern: Regex pattern for fixed links to convert to sites
"""
# Process fixed links matching patterns as both bodies (for physics)
# and sites (for sensors)
update_geom_collisions()
Updates collision properties based on YAML configuration:
def update_geom_collisions(xml_file_path, collision_yaml_path):
"""Update collision properties of an MJCF XML file.
Args:
xml_file_path: Path to MJCF XML file
collision_yaml_path: Path to collision config YAML
"""
# Load collision specifications
with open(collision_yaml_path, 'r') as f:
collision_specs = yaml.safe_load(f)
# Disable existing collisions
for geom in root.findall(".//body//geom"):
if not collision_props_set(geom):
disable_collision(geom)
# Add collision geometries
for body_name, spec in collision_specs.items():
add_collision_geom(body, spec)
exclude_self_collisions()
Excludes specified collision pairs:
def exclude_self_collisions(
xml_file_path,
allowed_collision_pairs=[]
):
"""Exclude self-collisions except allowed pairs.
Args:
xml_file_path: Path to MJCF XML file
allowed_collision_pairs: List of allowed patterns
"""
# Find collision pairs to exclude
pairs = find_collision_pairs(root)
# Filter allowed pairs
pairs = filter_allowed_pairs(
pairs,
allowed_collision_pairs
)
# Add exclusions
add_collision_exclusions(root, pairs)
Performance Considerations
Mesh vs. Primitive Performance
Performance comparison on a typical system:
Optimization Tips
Use simplified collisions for real-time applications
Adjust collision margins if needed
Consider contact filtering for specific scenarios
Balance precision vs. performance based on needs
Troubleshooting
Common Issues
Missing Collisions
If collisions aren’t working:
Check collision group assignments
Verify contype/conaffinity settings
Review collision exclusions
Validate primitive parameters
Unstable Contacts
If experiencing contact instability:
Adjust collision margins
Check primitive sizes
Consider using different primitive types
Review solver parameters
Next Steps
After setting up collision models:
Configure actuators
Add sensors
Test with Hand Model Examples